
 The Setup
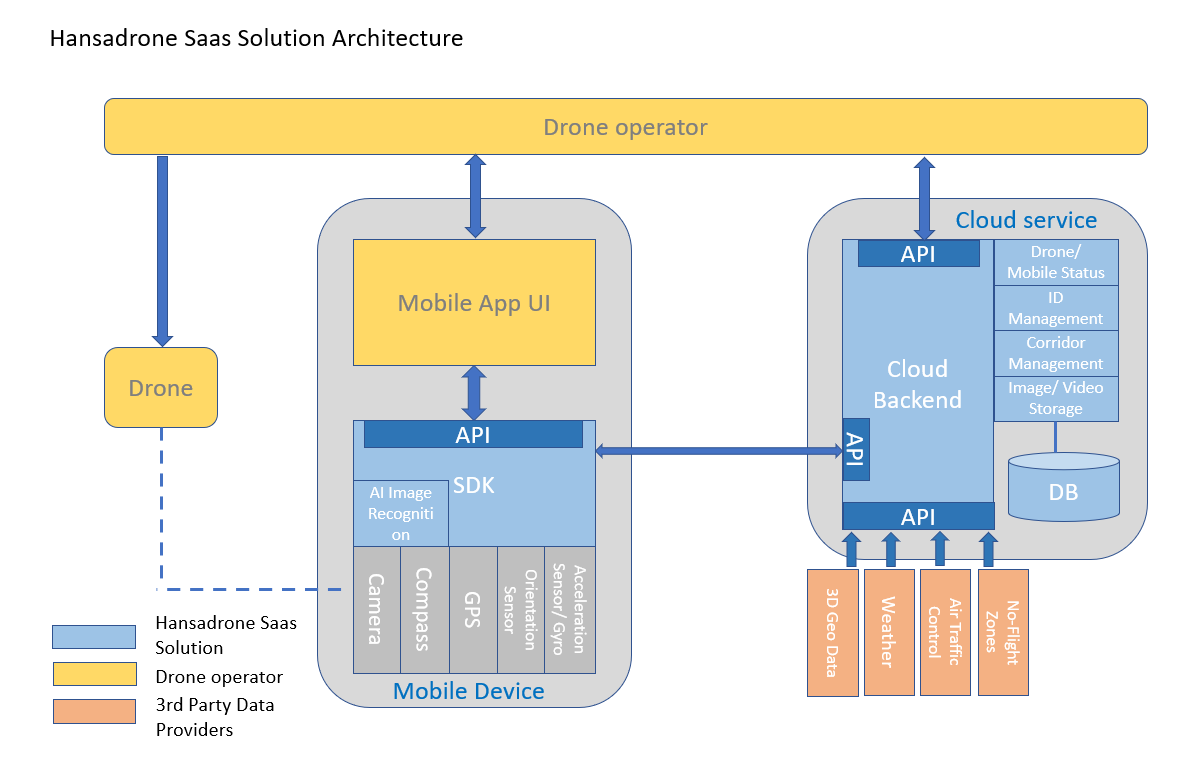
The Setup The Hansadrone ecosystem consists of three main elements: A mobile app running on the smartphone of the customer, a cloud based backend and an integration layer at the drone flight management software.
The smarthphone component comes as an SDK that can easily be integrated with your existing app. This app will be used by the customer to define a safe approach corridor from where the drone can best approach him and will guide the drone throughout the approach flight.
The cloud based backend is the communication interface between the mobile app and the drone flight management system. It also records any approach data and performs validation tasks before an approach corridor is approved.
The flight management software integration layer connects the drone to the cloud API and receives guidance information to navigate the drone safely from cruising altitude right to the balcony or window of the customer.
Getting StartedWe recommend to start with this video to set up the service for your drone, it only takes a few minutes. For the initial setup, no real drone is required. We have a web based dashboard that allows to try out the main steps even without a drone.
This service is free of charge for non commercial usage. Use the registration form at the end of this page to get an API key.
For mavlink enabled drones like PX4 or ARDUPILOT, we have a Python demo script available that can be used as a reference implementation. For other drone flight management systems, we have an API that you can connect to.
Please note that Hansadrone.com is currently operating in MVP mode, so the mobile app is available for Android only. This demo app has an integrated UI. Later, this will be an SDK that you can integrate to your app.
Use the Hansadrone Service in a Simulator The service can even be used without a real drone: To get started and for development purposes, a drone simulator can be used to perform the precision approach in a virtual environment.
In this video, we show how to use a simple and lightweight simulator called jmavsim to run the PX4 autopilot stack in a simulated environment and how to connect the simulator to the Hansadrone cloud backend.
To close the control loop, a simple red LED light can be used to simulate the drone light, which is recognized by the smartphone app during the approach phase.
The Hansadrone API reference is available here.
The MAVSDK integration Python script can be found on our Github repository.
The mobile app can be downloaded here (Android only).
Our Drones Hansadrone is a software-only solution and we are not building drones. But to showcase the end-to-end process, we have designed a family of drones that are optimized to serve customers in apartments with no landing zone or package dropoff location.
Pelican 80
The Pelican 80 is a delivery drone demonstrator. Its compact design allows operations in densely built up urban environments. The airfoil-shaped body provides space to store the delivery goods and allows easy access through a front hatch.
Pelican 100
The pelican 100 is an actual delivery drone with a payload of 2,5kg. It runs the same Pixhawk4/PX4 autopilot as the Pelican 80 and also has a ultrasonic distance sensor as well as an LED light to be recognized by the customers smartphone.

Get API key
Try out yourself how easy it is to navigate your delivery drone right into the hands of the customer using the Hansadrone final 50 feet service. Register today to get your free API key. Watch this video to get started.
Try out yourself how easy it is to navigate your delivery drone right into the hands of the customer using the Hansadrone final 50 feet service. Register today to get your free API key. Watch this video to get started.